Additional data: a priori knowledgment about the environment
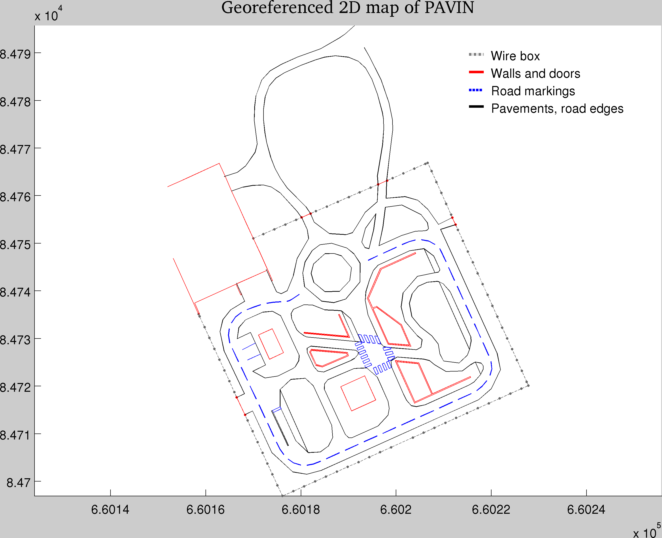
2D map of PAVIN
A 2D map of PAVIN, extracted from the topographical plan of land surveyors is available under the form of 2D georeferenced points, grouped by elements of the environment (walls, road boardes, buildings ...).
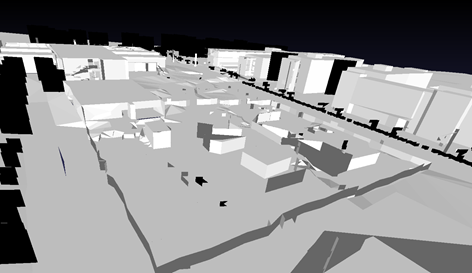
3D model of PAVIN
We are currently in discussion with legal experts to see if it is possible to provide the 3D model of PAVIN we have.
Georeferenced panoramic images
The file GeoreferencedImagesList.txt contains a list of Google Street View panorama ids with their georeferenced positions. Those data can be used as a priori data for the Cézeaux workspace.
Log format
| line |
GeoreferencedImagesList.txt
|
|
name |
latency |
lng |
pano_id |
zoom |
proj |
pano_yaw |
tilt_yaw |
tilt_pitch |
Details:
- the image filename that will be downloaded (name). Images are saved in .jpeg.
- lat and lng are the latitude and the longitude (absolute vehicle location), in WGS coordinates, expressed in degrees
- zoom is the zoom level (this level is equal to 3 for all images for our environment). With such a zoom level, the image resolution of the panorama is 3328x1664 pixels.
- proj is the projection type (spherical for all images of our environment)
- pano_yaw (denotes the angle between vehicle front and the north), tilt_yaw and tilt_pitch (denotes how the vehicle tilts due to road slope) are expressed in degrees.
(refer to Google Street View Image API and GoogleStreetviewStaticAPI)
The panoramas can be downloaded using the application
StreetViewImagesDownloader.
Those images can be used for instance to georeference a topological map built using the images from the catadioptric camera.
| StreetView image |
Image from the catadioptric camera, unwarped |
 |
 |
 |
 |