Vehicle summary
The VIPALAB is a platform dedicated to autonomous vehicle development. Its small dimensions (length 1.96m, width 1.30m, height 2.11m) are appropriate to urban environments. We have equipped this autonomous cab with industrial sensors: 6 video cameras, a webcam, 2 range sensors, 1 low-cost GPS, a set of proprioceptive sensors and a RTK-GPS providing the ground truth.

Sensors
| Sensor | Alias | Model | Description | Framerate | |
|---|---|---|---|---|---|
| Forward left camera | f-l-cam | FOculus FO432IB camera + Pentax C418DX lens (datasheet1,datasheet2) | Gray-level images, hfov:72deg, 1024x768pix | 7.5 Hz | |
| Forward right camera | f-r-cam | ||||
| Backward camera | b-cam | ||||
| Forward middle camera | f-m-cam | Marlin F-131B + Pentax TV Lens H416ER (datasheet1,datasheet2) | Gray-level images, hfov:86deg, 1024x768pix | 7.5 Hz | |
 |
Catadioptric camera | cata-cam | Basler color camera scA1300-32fc + Kumotek mirror VS-C800MR (datasheet1,datasheet2) | Color images, 1280x960pix | 7.5 Hz |
| Fisheye camera | fe-cam | Basler color camera scA1300-32fc + Fujinon lens FE185C057HA1 (datasheet1,datasheet2) | Color images, fov:185deg, 1280x960pix | 7.5 Hz | |
| Webcam | web-cam | Logitech QuickCam Pro 9000 (datasheet) | Color images, 640x480pix | 15 Hz | |
| Horizontal range sensor | hz-range sensor | SICK LMS151-10100 (datasheet) | Range data in [0;50m], angle in [-45;225] deg, res. 0.5 deg | 50 Hz | |
| Inclined range sensor | incl-range sensor | ||||
| RTK GPS | rtk-gps | NavTechGPS ProFlex500 (datasheet) | Accuracy within 2 cm | 10 Hz | |
| Low-cost GPS | lc-gps | uBlox-6T-0-001 (datasheet) | Accuracy: 2m to 2.5m | 1 Hz | |
| Motor odometry | odo-motor | Resolution of approximately 1mm | 50 Hz | ||
| Rear wheels odometry | odo-wheels | Resolution of approximately 2cm | 50 Hz | ||
| Steering angle measurement | steering | Theoretical resolution of 0.02 deg | 50 Hz | ||
| Accelerometer | acc | Freescale MMA7361LCR1 (datasheet) | 50 Hz | ||
| 1D gyrometer | gyro | Melexis MLX90609-N2 (datasheet) | 50 Hz | ||
Hardware architecture
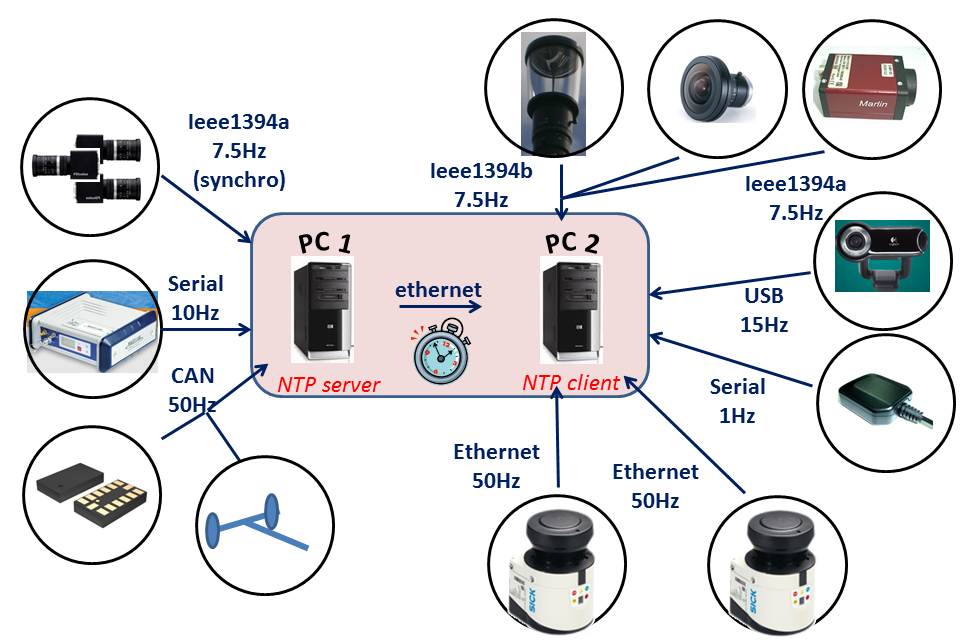
As the amount of data to store is very large, two computers have been used for acquisition. In the application running on the first computer (''PC1''), data from the proprioceptive sensors, the three synchronized camera, the RTK GPS are acquired and stored whereas the application in the second computer (''PC2'') manages the data from the other sensors. The clock of this computer is synchronised with the clock of the first computer through NTP procedure (for each sequence, a file ntpupdate.log resumes the update that have been applied). During experiments, we carefully check that the time difference is under some hundredth of milliseconds. The UTC time is recorded in both computers when the application started and timestamps are expressed relatively to this date. We then correct these timestamps allowing to express all data in a common temporal reference starting at the UTC time:
Details about the sensors
Visual sensors
The vehicle is equipped with 6 firewire cameras plus a USB webcam. As many robotic applications can take benefit from large field-of-view cameras as well as from color data, two cameras responding to these needs are embedded onto our vehicle.- 3 synchronized cameras

- Three identical sensors consisting of a FOculus F0432IB camera and a Pentax C4180X lens are mounted on the vehicle approximately at the same height (2 meters from the ground). The cameras f-l-cam and f-r-cam points are located in the front of the vehicle and looking ahead, centered by respect to the middle of the vehicle and respectively on the left and right sides whereas the camera b-cam is located in the middle at the back of the vehicle, looking backwards. The baseline for the bi-camera system \{f-l-cam + f-r-cam\} is roughly of 50 cm. However, it has to be noticed that there is a difference of 5 degrees between the orientation around the optical axis of those two cameras. Synchronization of those three cameras is supported utilizing the firewire bus time cycle register (125µsAutoSync mode). Gray-level images of resolution 1024x768 pixels are acquired at 7.5fps.
- Forward middle camera

- A Marlin F-131B camera is mounted at the middle of the vehicle, looking forward at 2m height. This is a camera with a highly sensitive type 2/3" global shutter CMOS sensor and equiped with a Pentax H416ER lens whose iris is controlled by an external system manufactured to Institut PASCAL.
- Catadioptric camera
-
A catadioptric sensor made of a Basler scA1300-32fc color camera and a Kumotek mirror VS-C800MR is positionned on top of the vehicle, at 1.20 meters from the roof. For this sensor, color images of resolution 1280x960 pixels are acquired at 7.5fps. With such a setup, the image of the roof does not go out so much from the dead zone of the sensor and only a small part of the content is out of the image. For convenience, a code is provided to unwarp images, obtaining a panorama with a resolution of 2941x385 pixels:
Omnidirectional image 
Unwarped image 
- Fisheye camera

- A Basler scA1300-32fc color camera looking forwards with a Fujinon FE185C057HA1 lens (field-of-view of 185 degrees) is mounted on top - front of the vehicle.
- Webcam

- Additionnaly, color images are acquired by a Logitech QuickCam Pro 9000 webcam embedded on the roof of the vehicle and looking forwards.
The three FOculus cameras and the Marlin camera are located inside the vehicle, just behind the windshield. Some unwanted reflections can thus appear in images. Those gray-level cameras use the Firewire IEEE1394a bus ( @400 mbps) while color cameras are within a Firewire IEEE1394b bus ( @800 mbps).
Range sensors
Two Sick LMS151-10100 range sensors (hz-range sensor and incl-range sensor) positionned on the front of the vehicle provide planar range data at 50 Hz.- Horizontal range sensor

- The first Sick LMS151-10100 range sensor is mounted so as to scan a horizontal plane at 50 cm from the ground.
- Inclined range sensor
- The second Sick LMS151-10100 range sensor is situated on top of the vehicle and is inclined, looking down. The inclination angle of incl-range sensor is around 20 degrees, resulting to impacts on the ground plane at 5 meters from the front of the vehicle. Such a distance is sufficient in our environment given our velocity (usually under 2.5m/s).
- These two range sensors positionned on the front of the vehicle provide planar range data at 50 Hz.
GPS sensors
- RTK GPS

- The data acquired with an embedded ProFlex500 RTK GPS receiver from NavtechGPS coupled with a Sagitta Magellan GPS base station are considered as the ground truth. This system provides an absolute localization measurements accurate to within 2cm at a 10 Hz sampling frequency. The GPS antenna has been located on top of the vehicle, straight up the point 0, in order that GPS receiver provides directly the location of that point.
- Low-cost GPS

- An uBlox LEA-6T-0-100 (low-cost GPS) is also embedded on the vehicle, providing data at 1 Hz.
- For both sensors, only GGA (Fix information) and GSV (Detailed Satellite data) NMEA sentences are acquired.
Proprioceptive sensors
- Motor odometry
- odo-motor provides data from a motor encoder, and measure the progress of the vehicle depends on the gear ratio and the diameters of the wheels. The sensor gives us 128 "top" per motor revolution, and behind one reducer of 1:9.9 and with wheels about 40 cm in diameter, this represents approximately 1mm per "top" (0.40 * 3.14/9.9/128) - Specific calibration datas (see [calibration]) helped us to specify the value of 1.095 mm/top.
- Wheels odometry
- Each rear wheel is equipped with an odometer in the form of a ring gear providing 64 "top" per wheel revolution. With wheels about 40 cm in diameter, this represents approximately 2cm per "top" (0.40 * 3.14/64) - Specific calibration data (see [Calibration]) allow you to specify this value as we did above for the main odometer vehiucle
- Steering angle
- The steering angle is obtained by reading the analog value of a potentiometer. The range of 60 degrees (+ /-30°) of the steering angle are digitized using a 12-bit ADC, which gives us a theoretical resolution of 0.015 degrees (60/4096).
- 3D accelerometer
- Gyrometer
- Proprioceptive sensors
- The proprioceptive measurements are accessible through a CAN gateway at a framerate of 50Hz.