Here are some samples of applications:
Loop closure detection
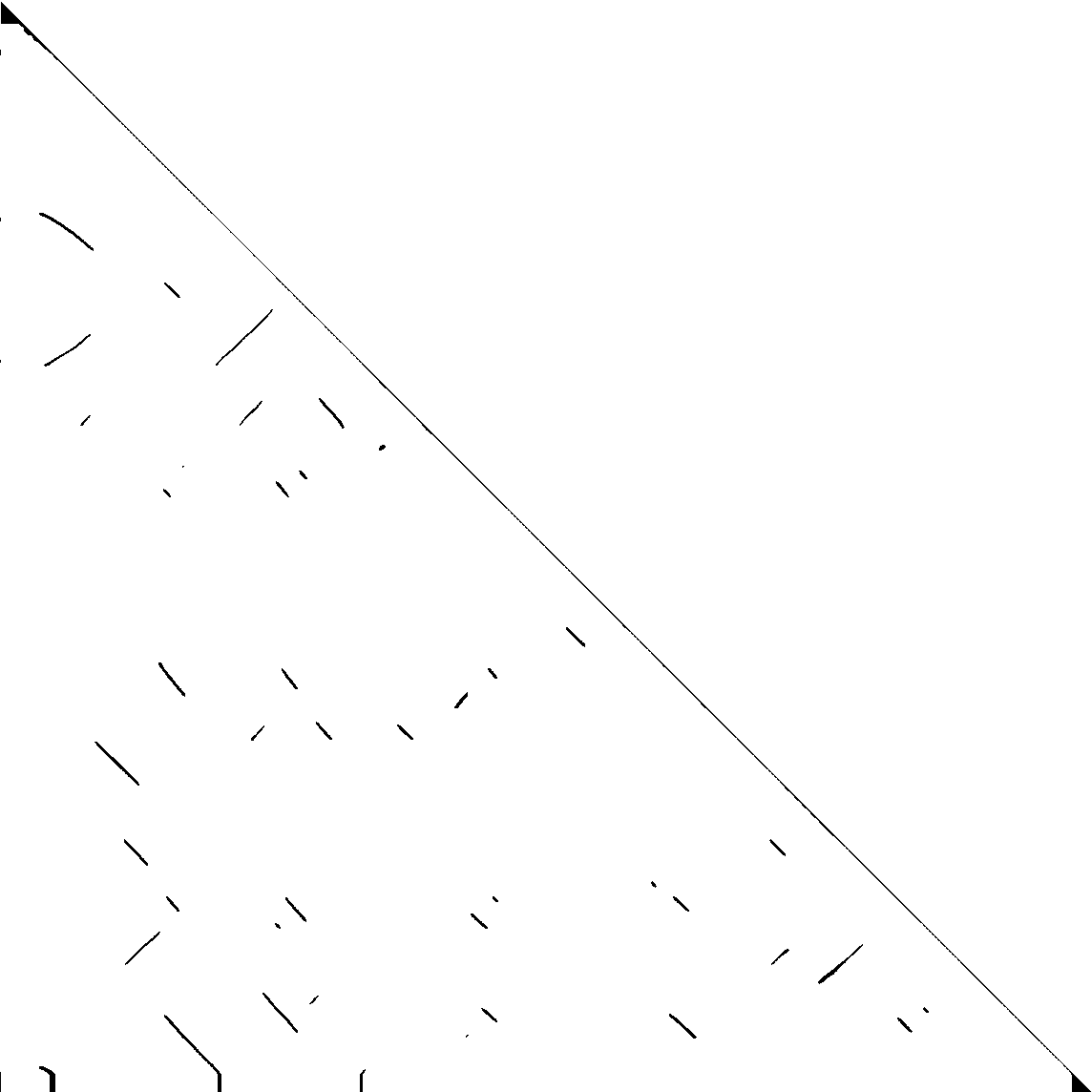
Similarity matrices for the sequence PAVIN-Jonco:
Loop-closure detection using the catadioptric camera
and the technique proposed in [Korrapati12] |
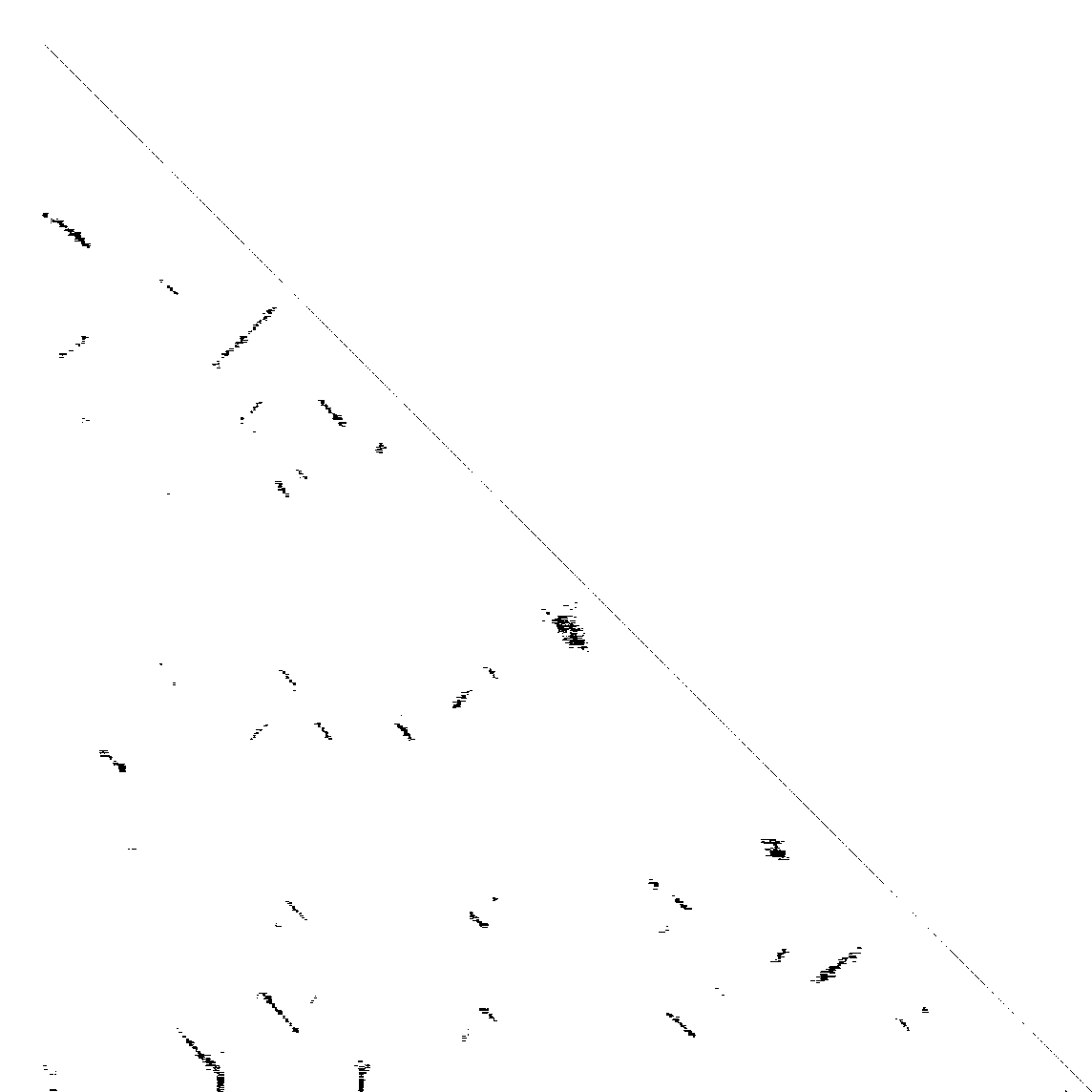 |
| Ground truth (DGPS; threshold of 2 meters) |
 |
- [Korrapati12] H. Korrapati, J. Courbon, Y. Mezouar, P. Martinet. Image Sequence Partitioning for Outdoor Mapping. In IEEE International Conference on Robotics and Automation, ICRA'12, Pages 1650-1655, St. Paul, MN, USA, 2012
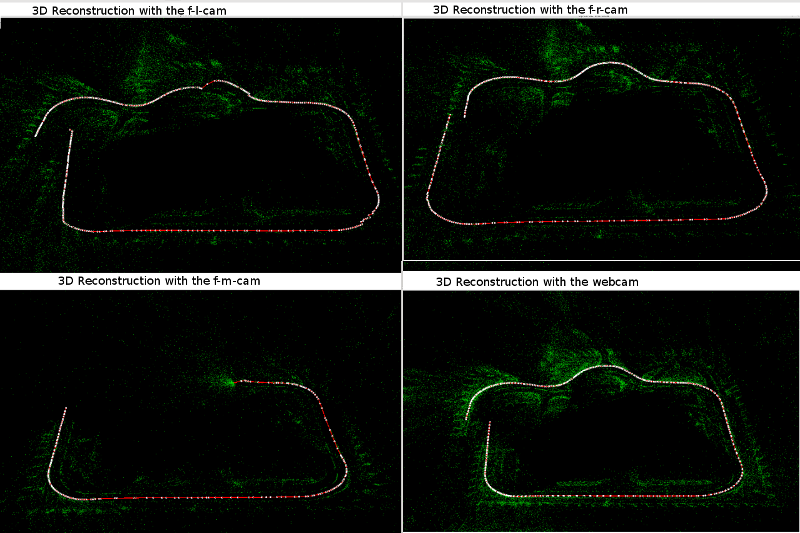
Structure-from-motion
Pose and 3D points obtained from the structure-from-motion algorithm described in
[Royer07] with the first loop of PAVIN-Jonco (without explicit loop closure)
| 3D Reconstruction |
 |
| Ground truth (DGPS) |
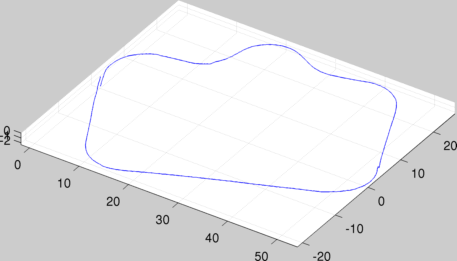 |
- [Royer07] E. Royer, M. Lhuillier, M. Dhome, and J.-M. Lavest. Monocular vision
for mobile robot localization and autonomous navigation. In International
Journal of Computer Vision, special joint issue on vision and robotics, vol. 74, pp. 237–260, 2007
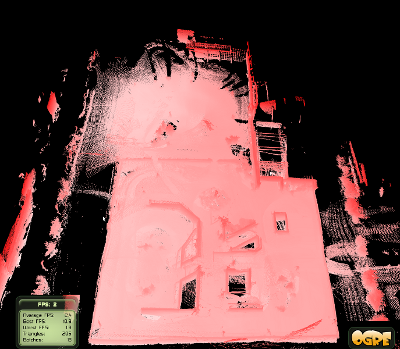
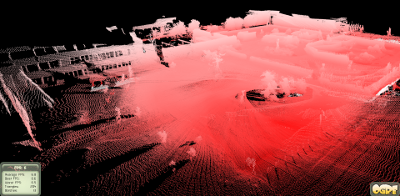
3D point cloud generation from range-sensors and dead-reckonition
Two views of the 3D point clouds obtained using the horizontal range sensor and dead-reckonition by odometry (without any interpolation nor correction) with the first elements of the PAVIN-Jonco sequence is drawn below.
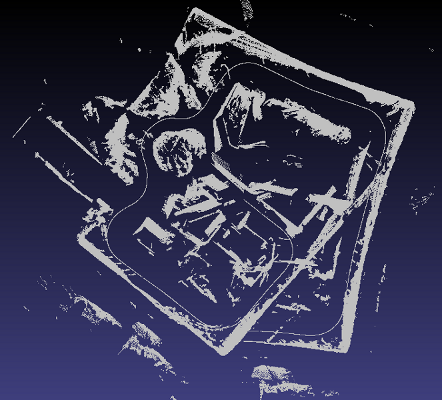
In the sequel, the trajectory is obtained bu fusing odometry and DGPS data (Kalman filter) and the range data are coming from the inclined range sensor, for the whole PAVIN-Jonco sequence.